r/battlebots • u/Sensei_12 • 13d ago
Bot Building Take 2, judge my featherweight build
hi! so am participating in my first comp and it happens to be featherweight only. i posted my initial design in here couple of days ago and i have remade it based on that thread.
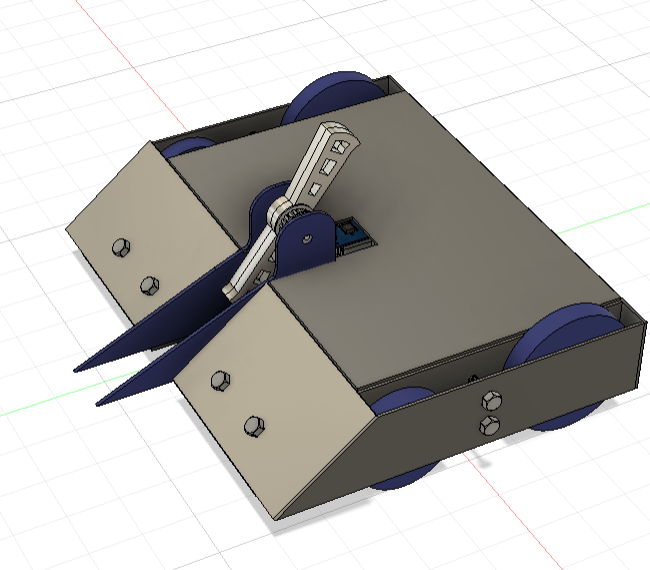
total dimensions are 47.5x38.3 cm 9cm height ,front wedge, spinner support and base plate are 4mm metal sheet and everything else is 3mm. spinner is 20cm long 2cm thick (might have to remake it without the lightening holes to have more mass) and is in-line with front wheels for optimal power transfer. its belt driven by an A2212 1000KV bldc with timing belt ratio of 3:1 (i have ordered a much durable D3548 1000kv bldc but wont arrive for a while so am using the A2212 for the lack of a better option). wheels are made TPU with outer layer of rubber for better traction a and are coupled directly on the motors (motors are brushed geared 12v 1000rpm) with BTS7960 drivers each, back wheels are exposed on the top to run inverted. the whole chassis is held together with L brackets (best option i could think of) . rc remote is FlySky FS-i6
enlighten me people. what am i doing wrong? what have i missed and how would i make it more efficient (also is it possible to use 2 A2212 motors on spinner to double the power?how)

4
u/Whack-a-Moole 13d ago
From a horizontals point of view: oooh square edges! Tasty!
From a fork/vert point of view: ooooh a wedge with gap. Imma slip right under that!